受模糊集合论创始人加利福尼亚大学Berkeley分校L. A. Zadeh教授的邀请,应用数学学院学术委员会主任、特聘教授李洪兴来到模糊数学的发源地,加利福尼亚大学Berkeley分校进行了专场学术报告。报告的题目为Stabilization of Four-stage Inverted Pendulum—A Problem of High Complexity; 时间为Wednesday, April 24, 2013, 2:15 p.m.;地点在ICSI Lecture Hall, U. C. Berkeley。
注: ICSI为International Computer Science Institute的缩写。
报告会首先由ICSI首席执行官Roberto Pieraccini博士致欢迎词,见图1。然后由粒化计算创始人,圣何塞州立大学T. Y. Lin教授主持报告会(见图2)。T. Y. Lin教授介绍了到会的主要学者以及简单叙述了如何发现李洪兴教授的卓越成就并把他介绍给Zadeh教授的过程。随后Zadeh教授站了起来,简介了模糊数学在倒立摆控制中的应用进展,表述了他对李洪兴工作的赞赏,还特别感谢了T. Y. Lin教授为他发现了李洪兴(见图3)。随后李洪兴教授用了一个多小时的时间对他的与模糊控制有关的主要成果作了报告(见图4)。内容包括:
1、论述了模糊推理规则与实验数据在一定意义下是等效的,于是便把如何获得一组模糊推理规则这样一个无从下手的棘手问题变为对实验数据的可操作性方法;2、给出了模糊系统的概率表示,即对于一个模糊系统,一定存在一个概率场以及定义在这个概率场上的随机向量,使得该模糊系统等于由这个随机向量形成的条件数学期望;3、详细描述了动态模糊系统的随机过程表示,由此发现了动态模糊系统的自适应机理;这个结论具有普适性,由它可以揭示经典自适应控制的自适应机理;此外,还揭示了模糊系统和随机系统之间的关系,即一个模糊系统可以转化为一个随机系统,反之亦然。从而形成了不确定性系统的统一理论,即模糊性和随机性都是不确定性的一种表现,它们之间不是对立的,而是互补的,并且可以相互转化;4、生动地讲解了变论域的思想和技术,说明了变论域和二型模糊集之间紧密关系,为二型模糊集的有效使用提供方便可行的方法;由此还提出了变维子空间的函数逼近方法,这为函数逼近论注入了新鲜血液;5、介绍了四级倒立摆的建模方法以及关于四级倒立摆的变论域自适应模糊器的设计。
简介了上述工作后,李洪兴教授和他的助手们在ICSI Lecture Hall现场进行了直线四级倒立摆实物实验演示。当高复杂性、高难度的直线四级倒立摆稳定起来以后,包括Zadeh教授在内的到会学者给出了热烈的掌声(见图5)。为记录这不可思议的一刻,大家纷纷利用手机拍照录像留念。
而后,Zadeh教授站了起来,连声说“remarkable!”,走到李洪兴面前,表达了他极高的评价(见图6),并表示会后将发给李洪兴一个“thank note”。出乎意料的是,Zadeh教授向李洪兴敬了一个礼(见图7),并说:“你的成就值得获控制论中的诺贝尔奖。”转天,李洪兴收到了Zadeh发来的感谢信。Zadeh教授在信上讲,“你所描述的系统是一项卓越的成就,我相信你的成就值得获一个大奖。你用精致的数学刻画倒立摆的稳定性给我留下了非常深刻的印象。我赞美和祝贺你的开创性的成就。”
此外,Zadeh教授在给李洪兴的邀请函中已经表明“你的工作对于控制论作了极其重要的贡献(见邀请函)。”
下面是Zadeh教授来信内容:
Dear Professor Li:
Many thanks for coming to Berkeley to make a presentation of your work on the four-stage inverted pendulum. The system which you described is a remarkable achievement. I believe that what you achieved is worthy of a major prize. I was highly impressed by the sophisticated mathematics which you employed to stabilize the pendulum. I was also highly impressed by the two-stage self-learning pendulum. Please accept my compliments and congratulations on your path-breaking achievement.
With my thanks and warm regards.
Sincerely,
Lotfi A. Zadeh
Professor Emeritus
Director, Berkeley Initiative in Soft Computing (BISC)

图1 ICSI首席执行官Roberto Pieraccini博士致欢迎辞

图2 T. Y. Lin教授主持报告会

图3 Zadeh教授简洁致辞

图4 李洪兴教授专场报告现场
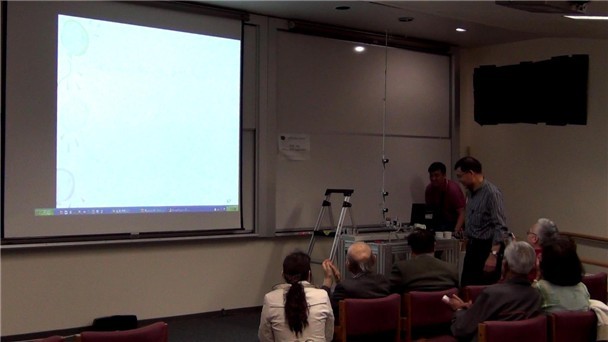
图5 大家为稳定后的四级摆实验热烈鼓掌
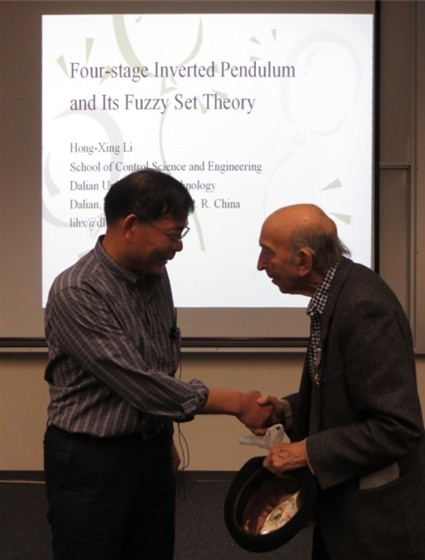
图6 报告会后Zadeh教授与李洪兴握手亲切交谈
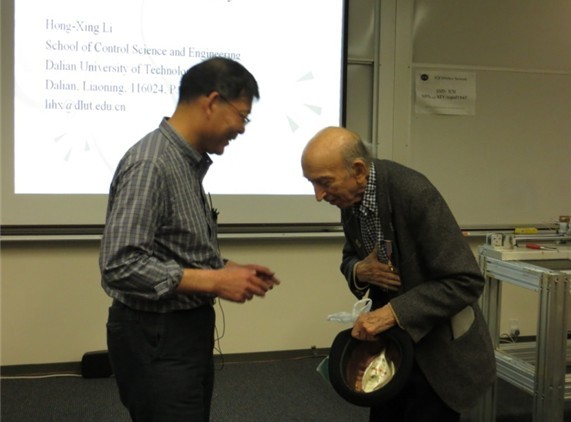
图7 Zadeh教授向李洪兴教授致以敬意
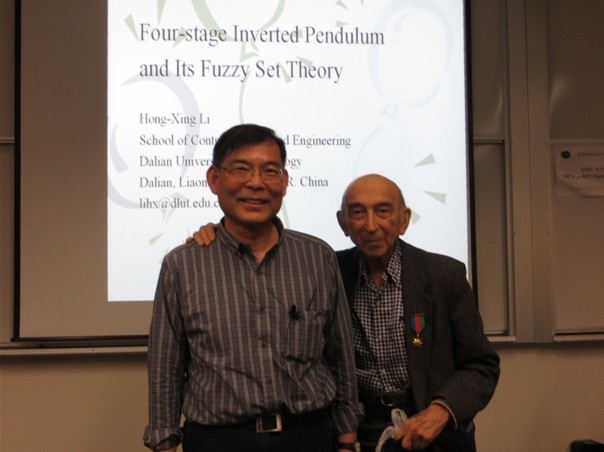
图8 李洪兴与Zadeh教授合影
附件 1. L.A. Zadeh教授简介
美国自动控制专家,美国工程科学院院士。1921年2月生于苏联巴库。 1949年获哥伦比亚大学电机工程博士。现任伯克利加利福尼亚大学电机工程与计算机科学系教授。因发展模糊集理论的先驱性工作而获电气与电子工程师学会(IEEE)的教育勋章。
Zadeh在控制理论方面有重要贡献。1949年他在关于时变网络频率分析的博士论文中引入的时变变换函数的概念,后来成为线性时变系统分析的工具。1950~1952年他和J.拉加齐尼合作,推广了维纳预测理论,在设计有限存储滤波器和预测器中得到广泛应用。他们发展的采样控制系统的Z变换逼近,成为分析这类系统的标准方法。1953年他给出一种设计非线性滤波器的新的逼近方法。1963年他和C.A.德舍尔合著的《线性系统的状态空间理论》是该领域的经典著作。书中介绍的状态空间逼近已成为最优控制中的标准工具,广泛用于工业机器人和社会经济系统。1965年,扎德在《信息与控制》杂志第8期上发表《模糊集》的论文,引起了各国数学家和自动控制专家们的注意。他通过引进模糊集(边界不明显的类)提供了一种分析复杂系统的新方法。他提出用语言变量代替数值变量来描述系统的行为,使人们找到了一种处理不确定性的方法,并给出一种较好的人类推理模式。60年来他所开创的模糊集领域得到了迅速发展。附件2. L.A. Zadeh教授报告会后致感谢信
Dear Professor Li:
Many thanks for coming to Berkeley to make a presentation of your work on the four-stage inverted pendulum. The system which you described is a remarkable achievement. I believe that what you achieved is worthy of a major prize. I was highly impressed by the sophisticated mathematics which you employed to stabilize the pendulum. I was also highly impressed by the two-stage self-learning pendulum. Please accept my compliments and congratulations on your path-breaking achievement.
With my thanks and warm regards.
Sincerely,
Lotfi Zadeh
--
Lotfi A. Zadeh
Professor Emeritus
Director, Berkeley Initiative in Soft Computing (BISC)
附件3. 倒立摆实物实验发展及进展简介
倒立摆实物控制实验是控制领域中用来检验某种控制理论或方法的典型方案.最初研究开始于二十世纪50年代,麻省理工学院(MIT)的控制论专家根据火箭发射助推器原理设计出一级倒立摆实验设备,而后世界各国都将一级倒立摆控制作为验证某种控制理论或方法的典型方案。后来人们又参照双足机器人控制问题研制二级倒立摆控制设备,从而提高了检验控制理论或方法的能力,也拓宽了控制理论或方法的检验范围。
三级倒立摆控制的实物实现最早是由日本东京工业大学Furuta等于1984年完成的,其中实物系统借助了双电机进行控制。此外,1990年德国波鸿大学Farwig和Unbehauen, 1995年英国莱斯特大学Tsachouridis和索尔福德大学Medrano-Cerda,1997年美国亚利桑那州立大学Eltohamy 等学者借助鲁棒控制、最优控制和自适应控制等多种控制方法对此实物系统同样进行了研究。特别需要提及的是:1995年,北京航空航天大学张明廉等在全世界率先实现用单电机通过模拟控制电路控制三级倒立摆的稳定。
在三级倒立摆控制的实物系统取得了成功之后,前后有国内外众多学者致力于四级倒立摆控制的仿真以及实物系统的研究:2001年东北大学肖军,张石以及徐心和等人借助三维模糊组合变量的模糊控制器首次实现四级倒立摆仿真控制;此后,2003年哈尔滨工程大学李莉,任洪亮,李福义等,2007年电子科技大学罗新斌和康戈文,2008年电子科技大学李良峰等众多学者借助模糊神经网络、分形隶属度函数以及滑模变隶属函数模糊控制等方法对四级倒立摆系统进行了仿真实验。此外,1994年后英国德比大学Lacombe发表了多篇关于四级倒立摆可控性分析的文章。
李洪兴领导的科研团队从2001年开始研究倒立摆的控制问题,在2001年5月实现四级倒立摆系统的仿真控制;并于2001年9月实现三级倒立摆系统的实物控制。从2001年10月着手研究四级倒立摆实物控制的实现问题。这是一个国际空白的极其困难的问题。经过10个多月的刻苦攻关,终于在2002年8月在世界上第一个成功实现了四级倒立摆实物控制。
实现这一世界领先的科研成果之后,李洪兴领导的科研团队转向空间倒立摆实物系统控制的研究。与之前研究的直线倒立摆,或者称为二维倒立摆相比较,空间倒立摆实物系统有如下差异:其一、小车运动不再局限于直线导轨,而是在平面上任意运动;其二、倒立摆摆杆不再局限于竖直平面内旋转,而是在三维空间中运动。历时八年艰苦奋战,2010年6月18日,李洪兴领导的科研团队在世界上首次成功实现了空间四级倒立摆实物系统的控制。
